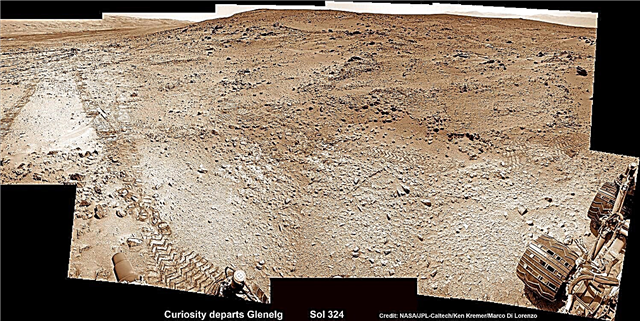
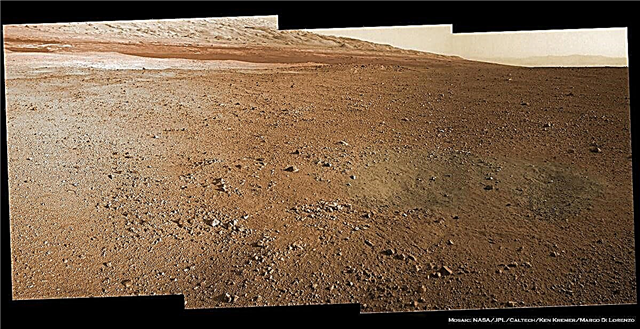
Bildetekst: Mosaikk fra Mount Sharp på Curingsitys Gale Crater landingssted. Gale Crater i disig avstand. Denne mosaikken ble sydd av tre Navcam-bilder i full oppløsning returnert av Curiosity på Sol 2 (8. august) og fargelagt basert på Mastcam-bilder fra 34 millimeter kameraet. Bearbeiding av Ken Kremer og Marco Di Lorenzo. Kreditt: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Curiosity rover har strålt tilbake de første detaljerte bildene av Mount Sharp, og tilbyr en overveldende innledende visning av hennes endelige kjøremål, og er nå midt i en avgjørende "hjernetransplantasjon" i helgen som vil gjøre henne om til en fullt operativ rover.
Vitenskapsteamet vil lede den seks hjulede nysgjerrigheten til å begynne å klatre på Mount Sharp på et senere tidspunkt under roverenes to år primære oppdrag etter å ha krysset og grundig undersøkt gulvet på landingsplassen hennes inne i Gale Crater.
Se vår mosaikk med fokus på bunnen av Mount Sharp ved å bruke tre bilder i full oppløsning som er knipset av Navcam-navigasjonskameraet som ligger på det nylig oppførte kameraet og instrumentmasten med fargelegging basert på Mastcam-fargekameraet på 34 millimeter.
Nysgjerrigheten hvilte nesten flatt på den martiske overflaten, men med en svak 3 graders tilt nedover foran og bildene så langt er hentet fra det forhåndsprogrammerte utsiktspunktet, omtrent noen kilometer fra Bas Sharp-basen.
Terrenget er strødd med små rullesteiner som kan stamme fra en nærliggende alluvialvifte som flytende vann strømmet for lenge siden, tror forsker. Observasjoner fra bane med NASAs Mars Reconnaissance Orbiter har identifisert leire og sulfatmineraler i de nedre lagene av Mount Sharp, noe som indikerer en våt historie. I høyere høyder håper forskere å oppdage et grenselag og indikasjoner på hva som førte til den store begivenhetsbegivenheten og tapet av flytende vann på den gamle Martiske overflaten.
Denne helgen har Curiosity også begynt å overføre spektakulære hi res Mastcam-bilder som langt overgår noe annet hittil. Her er Mastcam 360-pano som samlet av NASA så langt:

Bildetekst: Første Hi-Res Color Mosaic of Curiositys Mastcam-bilder. NASA / JPL-Caltech / MSSS
Men før den bilstore roboten faktisk kan svirpe seg, nå ut med den 7 fot lange (2 meter) instrumentbelastede armen og skaffe prøver for analyse ved de kjemikalie-laboratoriene som er ombord, trenger hun programvaresmart for å utføre vitenskapens oppgaver.
Med alle de opprinnelige målsettingene etter landing har oppnådd, bruker ingeniører ved NASAs Jet Propulsion Lab i Pasadena, California, fire Sols eller Martian-dager, og bracketing denne helgen for å laste opp en ny programvarepakke med navnet "R10" som er optimalisert for overflatedrift og vil erstatte den nåværende “R9” -pakken.
"Vi designet oppdraget fra starten for å kunne oppgradere programvaren etter behov for forskjellige faser av oppdraget," sa Ben Cichy fra NASAs Jet Propulsion Laboratory i Pasadena, California, sjef for programvareingeniør for Mars Science Laboratory-oppdraget. “Flyprogramvareversjonen Curiosity bruker for tiden [R9] var veldig fokusert på å lande kjøretøyet. Det inkluderer mange muligheter vi bare ikke trenger mer. Det gir oss grunnleggende muligheter for å betjene roveren på overflaten, men vi har planlagt hele tiden å bytte over etter landing til en versjon av flyprogramvare som virkelig er optimalisert for overflatedrift. "
Programvare på både primær- og sikkerhetskopimaskiner oppgraderes nøye i trinn for trinn. Han sa at det første tå-dyppet på fredag for å teste oppgraderingen var det første trinnet.
“R10 er optimalisert for overflatedrift og har det som vitenskapsteamet ønsker. Den blir lastet ned over de neste fire Sols for å muliggjøre dette fantastiske oppdraget, ”sa Cichy på en JPL-nyhets briefing 10. august. De vil stille seg på vitenskap for de neste fire Sols under installasjonen.
"Akkurat nå har vi muligheten i vår grunnleggende overflateprogramvare til å sjekke instrumentenes helse, men vi har ikke muligheten til å dra full nytte av all denne flotte maskinvaren vi har sendt til Mars."
“Så R10-programvaren gir oss muligheten til å bruke robotarmen fullt, å bruke drillen, bruke støvfjerningsverktøyet, bruke hele prøvetakingskjeden og skade skadene og analysere dem, alt dette spennende ting dette oppdraget vil gjøre .”
“Nysgjerrighet er en Martian mega rover og er født til å kjøre bil! R10 gir oss muligheten til å kjøre autonomt og bruke bilder for å oppdage farer og kjøre trygt. ”
Så langt går programvareoppgraderingen som planlagt i helgen.
Nysgjerrighet gjorde en enestående pinlanding inne i Gale Crater 5. august. 6 ved å bruke den rakettdrevne "Sky Crane" avstigningstrinnet som senket nysgjerrigheten med kabler på den røde planetenes overflate nøyaktig som planlagt på slettene på fjellet Sharp bare noen miles fra basen til det gigantiske fjellet.
Mount Sharp dekker store deler av det indre av den 15 mil brede (154 km) Gale Crater. Toppen på det 3,4 mil høye lagdelte fjellet er høyere enn Mount Whitney i California.
For sammenligning, se Curiositys opprinnelige bredere felt etter landing av Mount Sharp i 2D og 3D fra den lavere oppløsningen Hazcam-kameraer med fiskerøyer, her
NASAs 1 tonn mega rover Curiosity er den største og mest komplekse roboten som noen gang er sendt til overflaten av en annen planet, idrettslig en nyttelast på 10 moderne vitenskapelige instrumenter som veier 15 ganger mer enn noe tidligere kjørende kjøretøy. Curiosity har som mål å bestemme om Mars noen gang var i stand til å støtte mikrobielt liv, fortid eller nåtid, og å søke etter livstegn i form av organiske molekyler.