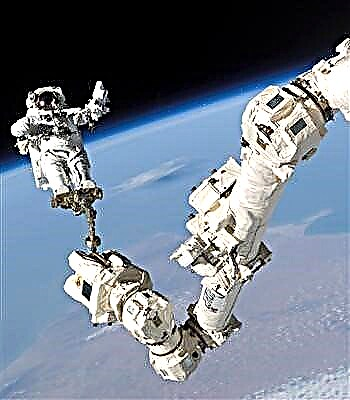
19. april 2001 lanserte romfergen Endeavours STS-100-oppdrag til romstasjonen, og i nyttelastbukta var Canadarm2, en større og mer robust etterfølger av skyttelens Canadarm. Space Station Remote Manipulator System (SSRMS) er en sofistikert “konstruksjonskran”, og er ansvarlig for mye av den vellykkede byggingen av ISS - modul for modul - i verdensrommet.
"Hun er uten tvil en av de mest kritiske komponentene ombord på stasjonen som har deltatt i byggingen av romskipet som er i bane i dag," sa Mike Suffredini, programleder for den internasjonale romstasjonen. ”Tjuenio oppdrag har blitt støttet av Canadarm2, hvor to av dem fanget og kvernet HTV-kjøretøyet, og i all den tiden med absolutt feilfri ytelse. Uten henne kunne vi ikke kommet dit vi er i dag. "
Se et galleri med bilder av Canadarm2s 10 år i rombyggingsbransjen.

Canadarm2 ble installert på ISS av astronauten Chris Hadfield under den første romvandringen av en kanadier. Canadarm2 har losset hundrevis av tonn utstyr og forsyninger ferjet med skyttelbussen og hjulpet nesten 100 romvandringer. Endeavours siste flyvning senere denne måneden vil markere Canadarm2s 28. Shuttle-oppdrag.

Det kanadiske romfartsorganet sier at Canadarm2s rolle på ISS vil utvide seg etter hvert som den orbitale laben nærmer seg ferdigstillelse: i tillegg til å utføre rutinemessig vedlikehold, vil robotarmen gjøre hyppigere "kosmiske fangster", der den vil fange, legge til kai og senere slippe besøkende romfartøy , som det har gjort med HTV. Når romfergen trekker seg, vil gjenbrukbare kommersielle romskip, som SpaceXs Dragon og Orbital’s Cygnus, brukes til å bringe forsyninger og utstyr til ISS. Canadarm2 vil fange opp hvert av disse besøksbilene. I slutten av 2011 og begynnelsen av 2012 vil Canadarm2 fange en serie på 6 kommersielle romfartøyer på bare 7 måneder, som begynner med Dragon-romfartøyet, som for øyeblikket er planlagt ankommet i oktober 2011.




Mer info om SSRMS og hvordan den ble bygget:
Ekspedisjonens 27 mannskap ombord på ISS hyller 10 år med SSRMS: