Hvis du har sett på høyoppløsningen HiRISE-bilder fra Mars Reconnaissance Orbiter, eller hatt sjansen til å utforske den nye Google Mars, vet du at Mars er full av kratre, fjell, sluker og alle slags interessante og farlige terreng. . Områder som disse med lagdelte avsetninger, sedimenter, brudd og feil er bare den typen steder å lete etter kildene til metan som blir produsert på Mars. Men det er altfor risikabelt å sende vår nåværende stil av rovers, inkludert Mars Science Laboratory (MSL), 2011 i forrædersk terreng. Men ingeniører fra JPL, sammen med studenter ved California Institute of Technology, har designet og testet en allsidig robot med lav masse som kan legges til større rovere som MSL som kan rappellere av klipper, reise tungt over bratt og steinete terreng og utforske dype kratere.
Denne prototype roveren, kalt Axel, kan hjelpe fremtidig robotromsfartøy bedre å utforske og undersøke fremmede verdener som Mars. På jorden kan Axel hjelpe til i søk-og-redningsaksjoner.
"Axel utvider vår evne til å utforske terreng som vi ikke har vært i stand til å utforske tidligere, for eksempel dype kratre med vertikalt skrånende odder," sa Axels hovedetterforsker, Issa A.D. Nesnas, fra JPLs robotikk- og mobilitetsseksjon. Fordi Axel er relativt lavmasse, kan et oppdrag føre en rekke Axel-rovere. Det vil gi oss muligheten til å være mer aggressive med terrenget vi ville utforske, samtidig som vi beholder den overordnede risikoen.
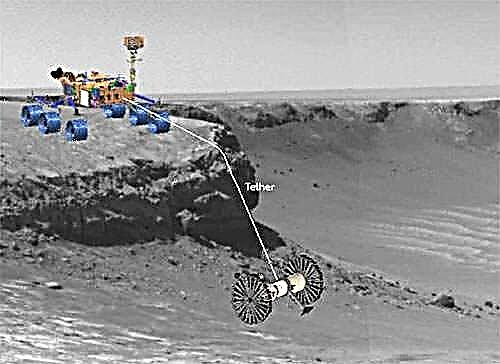
Nesnas sa Axel er som en yo-yo - den ligger på et bind som er festet til en større rover og kan gå opp og ned på sidene av kratere, kløfter og sluker, og utforske regioner som ikke er trygge for andre rover.

Den enkle og elegante designen til Axel, som kan betjene både opp ned og høyre side opp, bruker bare tre motorer: en for å kontrollere hvert av de to hjulene sine og en tredje for å kontrollere en spak. Spaken inneholder et øse for å samle mån- eller planetmateriale for forskere å studere, og den justerer også robotens to stereokameraer, som kan vippe 360 grader.

Axels sylindriske kropp har databehandlings- og trådløs kommunikasjonsfunksjoner og en treghetssensor for å fungere autonomt. Det sportser også et bind som Axel kan løsne for å stige ned fra en større lander, rover eller ankerpunkt. Roveren kan bruke forskjellige hjultyper, fra store sammenleggbare hjul til oppblåsbare, som hjelper roveren til å tåle en hard landing og takle steinete terreng.
Axel har vært i utvikling siden 1999, og studenter fra Caltech, Purdue University og Arkansas Tech University har samarbeidet med JPL gjennom årene for å utvikle denne allsidige roveren.
For mer informasjon om Axel, se JPLs Axel-side og Caltechs Axel-nettsted.