Følgende er et utdrag fra min nye bok, "Utrolige historier fra verdensrommet: et bak kulissene se på oppdragene som endrer vårt syn på kosmos", som vil bli utgitt i morgen, desember. Boken er et indre blikk på flere aktuelle NASAs robotoppdrag, og dette utdraget er del 1 av 3 som vil bli lagt ut her på Space Magazine, i kapittel 2, “Roving Mars with Curiosity.” Boken er tilgjengelig for bestilling hos Amazon og Barnes & Noble.
Syv minutters terror
Det tar omtrent syv minutter før et romfartøy i middels størrelse - for eksempel en rover eller en robotlander - kommer ned gjennom Mars-atmosfæren og når planetens overflate. I løpet av de korte minuttene må romfartøyet bremses opp fra sin brennende innkommende hastighet på omtrent 20 000 km / t for å røre ved bare 3 km / t.
Dette krever at en Rube Goldberg-lignende serie av hendelser skal finne sted i perfekt rekkefølge, med presis koreografi og timing. Og alt trenger å skje automatisk via datamaskin, uten innspill fra noen på jorden. Det er ingen måte å lede romfartøyet fjernt fra planeten vår, omtrent 250 millioner kilometer unna. På den avstanden tar radiosignalforsinkelsestiden fra Jorden til Mars over 13 minutter. Derfor, når den syv minutter lange nedstigningen er ferdig, har alle disse hendelsene skjedd - eller ikke skjedd - og ingen på Jorden vet hvem. Enten romfartøyet ditt sitter praktfullt på overflaten av Mars eller ligger i en krasjet haug.

Det er grunnen til at forskere og ingeniører fra oppdragene til Mars kaller det "Seven Minutes of Terror."
Og med Mars Science Laboratory (MSL) -oppdraget, som ble lansert fra Jorden i november 2011, økte frykten og skremmelsen for det som offisielt kalles ‘Entry, Descent and Landing’ (EDL) eksponentielt. MSL har en 1 ton (900 kg), 6-hjulet rover som heter Curiosity, og denne roveren skulle bruke et helt nytt, uprøvd landingssystem.
Til dags dato har alle Mars-landere og rovere brukt - i rekkefølge - en rakettstyrt inngang, et varmeskjold for å beskytte og bremse kjøretøyet, deretter en fallskjerm, etterfulgt av skyver for å bremse kjøretøyet enda mer. Nysgjerrighet vil også bruke denne sekvensen. En siste, avgjørende komponent omfattet imidlertid en av de mest komplekse landingsenhetene som noensinne er fløyet.

Døpt "Sky Crane", ville en svevende rakettetappe senke roveren på 20 meter kabler av Vectran-tau som en rappellerende fjellklatrer, med roveren myk-landing direkte på hjulene. Alt dette måtte fullføres i løpet av sekunder, og når datamaskinen ombord avkjenet touchdown, ville pyroteknikk kutte tauene, og det svevende avstigningsstadiet ville zoome bort med full gass til å krasje land langt fra nysgjerrighet.
Etter å ha komplisert saken ytterligere, skulle denne roveren prøve den mest presise landingen utenfor verden noensinne, og satte seg ned i et krater ved siden av et fjell på høyden av Mount Rainier.
En stor del av usikkerheten var at ingeniører aldri kunne teste hele landingssystemet sammen, i rekkefølge. Og ingenting kunne simulere de brutale atmosfæriske forhold og lettere tyngdekraft som er til stede på Mars bortsett fra å være på selve Mars. Siden den virkelige landingen ville være første gang den fullstendige Sky Crane ble brukt, var det spørsmål: Hva om kablene ikke skulle skille seg fra hverandre? Hva om nedstigningsstadiet fortsatte å falle rett på toppen av roveren?
Hvis Sky Crane ikke fungerte, ville det være spill for et oppdrag som allerede hadde overvunnet så mye: tekniske problemer, forsinkelser, kostnadsoverskridelser og vrede fra kritikere som sa at denne $ 2,5 milliarder Mars-roveren blødde penger fra resten av NASAs planetariske leteprogram.

Oppdrag til Mars
Med sin røde glød på nattehimmelen har Mars vinket til skywatchers i århundrer. Som den nærmeste planeten til Jorden som gir et potensial for fremtidige menneskelige oppdrag eller kolonisering, har den vært av stor interesse i tidsrommet for romutforskning. Til dags dato har over 40 robotoppdrag blitt lansert til Red Planet ... eller mer presist, 40-pluss oppdrag har vært forsøkt.
Inkludert all USA, europeisk, sovjetisk / russisk og japansk innsats, har mer enn halvparten av Mars-oppdragene mislyktes, enten på grunn av en oppskytningskatastrofe, en funksjonsfeil på vei til Mars, et forkert forsøk på å skli i bane eller en katastrofal landing. Mens de siste oppdragene har hatt større suksess enn våre første banebrytende forsøk på å utforske Mars in situ (på lokasjon), er romforskere og ingeniører bare tøys når de snakker om ting som en 'Great Galactic Ghoul' eller 'Mars Curse' som tuller opp oppdrag.

Men det har vært fantastiske suksesser også. Tidlige oppdrag på 1960- og 70-tallet, som Mariner orbiters og Viking-landere, viste oss en påfallende vakker, selv om karrig og steinete verden, og på den måten smadret alle håp om ‘små grønne menn’ som våre planetariske naboer. Men senere oppdrag avslørte en dikotomi: praktfull øde kombinert med fristende antydninger til fortidens - eller kanskje til og med dagens - vann og global aktivitet.
I dag er Mars 'overflate kald og tørr, og dens hvisketynne atmosfære beskytter ikke planeten mot bombardement av stråling fra solen. Men indikasjoner er at forholdene på Mars ikke alltid var slik. Synlige fra bane er kanaler og kompliserte dalsystemer som ser ut til å ha blitt skåret av rennende vann.
I flere tiår har planetforskere drøftet om disse funksjonene dannet seg i korte, våte perioder forårsaket av kataklysmiske hendelser som et massivt asteroideangrep eller plutselig klimaulykke, eller om de dannet seg over millioner av år da Mars kan ha vært kontinuerlig varm og våt. Mye av bevisene så langt er tvetydige; disse funksjonene kunne ha dannet seg uansett. Men for milliarder av år siden, hvis det var elver og hav, akkurat som på jorden, kan livet ha tatt grep.

The Rovers
Curiosity rover er det fjerde mobile romfartøyet NASA har sendt til Mars 'overflate. Den første var en 23-kilos (10,6 kg) rover ved navn Sojourner som landet på en bergdekket Martian-slette 4. juli 1997. Omtrent på størrelse med en mikrobølgeovn traverste den 65 fot lange Sojourner aldri mer enn 40 meter fra lander og basestasjon. Rover og lander utgjorde sammen Pathfinder-oppdraget, som ventet varte i omtrent en uke. I stedet varte det i nesten tre måneder, og duoen returnerte 2,6 gigabiter med data, snappet mer enn 16 500 bilder fra lander og 550 bilder fra rover, i tillegg til å ta kjemiske målinger av steiner og jord og studere Mars 'atmosfære og vær. Den identifiserte spor etter en varmere, våtere fortid for Mars.

Oppdraget skjedde da Internett bare ble mer populært, og NASA bestemte seg for å legge ut bilder fra roveren på nettet så snart de ble strålt til Jorden. Dette endte med å bli en av de største begivenhetene i det unge Internettets historie, med NASAs nettsted (og speilsider satt opp for den høye etterspørselen) som mottok over 430 millioner treff de første 20 dagene etter landing.
Pathfinder benyttet seg av et uvanlig landingssystem. I stedet for å bruke thrustere for å berøre overflaten, tegnet ingeniører et system med gigantiske kollisjonsputer for å omgi og beskytte romskipet. Etter å ha brukt det konvensjonelle systemet med en rakettstyrt inngang, varmeskjold, fallskjerm og thrustere, oppblåst kollisjonsputene og den kokonerte landeren ble droppet fra 30 meter over bakken. Pathfinder stoppet flere ganger over Mars 'overflate ganger som en gigantisk strandkule, og kom til slutt til stopp, kollisjonsputene tappet av og lander åpnet seg for å la roveren komme frem.
Selv om det kan høres ut som en vanvittig landingsstrategi, fungerte den så bra at NASA bestemte seg for å bruke større versjoner av kollisjonspute til neste rover-oppdrag: to identiske rovere ved navn Spirit og Opportunity. Mars Exploration Rovers (MER) er omtrent på størrelse med en ridende gressklipper, 1,6 fot (1,6 meter) lang, og veier omtrent 185 kg. Spirit landet vellykket i nærheten av Mars 'ekvator 4. januar 2004, og tre uker senere spratt muligheten ned på den andre siden av planeten. Målet med MER var å finne bevis på fortidens vann på Mars, og begge roverne slo jackpoten. Blant mange funn fant Opportunity eldgamle bergarter som ble dannet i rennende vann og Spirit fant uvanlige blomkålformede silisiumdyr bergarter som forskere fremdeles studerer, men de kan gi ledetråder til potensielt gammelt marsliv.

Utrolig nok, under dette skrivet (2016), er fortsatt Opportunity-roveren i drift, og kjører mer enn et maraton (42 km) og fortsetter å utforske Mars ved et stort krater ved navn Endeavour. Spirit ga imidlertid etter for tap av krefter under den kalde marsvinteren i 2010 etter å ha sittet fast i en sandfang. De to roverne levde langt over den forventede 90-dagers levetiden.
På en eller annen måte utviklet roverne hver en distinkt ‘personlighet’ - eller, kanskje en bedre måte å uttrykk det på, er at mennesker tildelt personligheter til robotene. Spirit var et problembarn og dramadronning, men måtte kjempe for enhver oppdagelse; Muligheten, en privilegert yngre søster og stjernepresentant, ettersom nye funn så ut til å komme lett for henne. Spirit and Opportunity var ikke designet for å være søt, men de sjarmerende rovers fanget fantasien til barn og erfarne romveteraner. MER prosjektleder John Callas kalte en gang tvillingroverne "de søteste dunne tingene ute i solsystemet." Da de langvarige, pisse roverne overvant farer og farer, sendte de postkort fra Mars hver dag. Og jordboere elsket dem for det.
Nysgjerrighet
Selv om det lenge har vært på vår oppgaveliste, har vi ennå ikke funnet ut hvordan vi skal sende mennesker til Mars. Vi trenger større og mer avanserte raketter og romfartøy, bedre teknologi for ting som livsstøtte og dyrking av vår egen mat, og vi har virkelig ikke evnen til å lande de veldig store nyttelastene som trengs for å skape et menneskelig oppgjør på Mars.
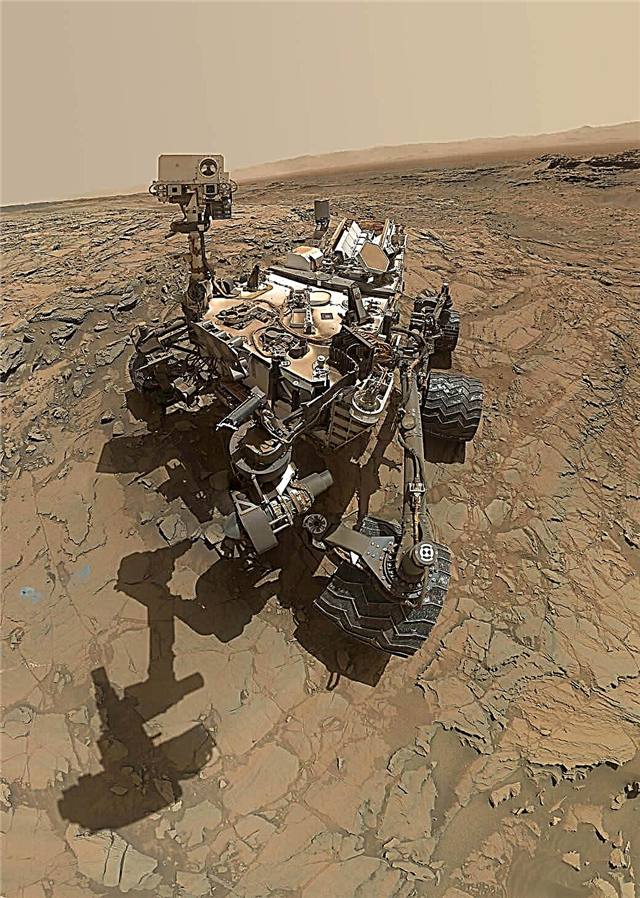
Men i mellomtiden - mens vi prøver å finne ut av alt det - har vi sendt robotekvivalenten til en menneskelig geolog til Røde planeten. Den bilstore Curiosity-roveren er bevæpnet med en rekke sytten kameraer, en drill, en scoop, et håndlinser og til og med en laser. Disse verktøyene ligner utstyr geologer bruker for å studere bergarter og mineraler på jorden. I tillegg etterligner denne roveren menneskelig aktivitet ved å klatre i fjellet, spise (figurativt sett), bøye sin (robot) arm og ta selfies.

Denne rovende robotgeologen er også et mobilt kjemilaboratorium. Totalt ti instrumenter på roveren hjelper til med å søke etter organisk karbon som kan indikere råstoffet som kreves av livet, og "sniff" den martiske luften, og prøver å lukte om gasser som metan - som kan være et tegn på liv - er til stede. Curiositys robotarm bærer en sveitsisk hærs kniv av dingser: et forstørrelsesglasslignende kamera, et spektrometer for å måle kjemiske elementer, og en drill for å bore inne i bergarter og mate prøver til laboratoriene som heter SAM (Sample Analysis at Mars) og) og CheMin (Kjemi og Mineralogi). ChemCam-laser kan fordampe berg fra opptil 7 meter unna, og identifisere mineraler fra spekteret av lys som sendes ut fra den sprengte fjellet. En værstasjon og strålingsovervåker avrunder enhetene om bord.
Med disse kameraene og instrumentene blir roveren øynene og hendene for et internasjonalt team på rundt 500 jordvitere.
Mens de forrige Mars-roverne brukte solarrayer for å samle sollys for strøm, bruker Curiosity en RTG som New Horizons. Elektrisiteten som genereres fra RTG gir kraftige oppladbare litium-ion-batterier, og RTG-varmen ledes også inn i rover-chassiset for å holde den indre elektronikken varm.
Med Curiositys størrelse og vekt var landingssystemet for kollisjonspute som ble brukt av de forrige roverne, uaktuelt. Som NASA-ingeniøren Rob Manning forklarte: "Du kan ikke sprette noe så stort." Sky Crane er en dristig løsning.
Curiositys oppdrag: finne ut hvordan Mars utviklet seg over milliarder av år og bestem om det en gang var - eller til og med nå, er i stand til å støtte mikrobielt liv.
Nysgjerrighetens mål for leting: 5,5 km høye Mars-fjellforskere kaller Mt. Skarp (formelt kjent som Aeolis Mons) som ligger midt i Gale Crater, et 96 mil langt slagbasseng i diameter.
Gale ble valgt fra 60 kandidatsteder. Data fra kretsende romfartøy bestemte at fjellet har mange titalls lag med sedimentær bergart, kanskje bygget over millioner av år. Disse lagene kunne fortelle historien om Mars 'geologiske og klimahistorie. I tillegg ser det ut til at både fjellet og krateret har kanaler og andre funksjoner som ser ut som om de ble skåret av rennende vann.
Planen: MSL skulle lande i en lavere, flatere del av krateret og forsiktig jobbe seg oppover mot fjellet, studere hvert lag, i hovedsak ta en omvisning i epokene fra Mars 'geologiske historie.
Det vanskeligste ville være å komme dit. Og MSL-teamet hadde bare en sjanse til å få det til.
Landing Night
Curiositys landing 5. august 2012 var en av de mest etterlengtede romutforskningsbegivenhetene i nyere historie. Millioner av mennesker så hendelser utfolde seg på nettet og på TV, med sosiale medier feeds summende av oppdateringer. NASA TVs strøm fra JPLs misjonskontroll ble sendt direkte på skjermene på New Yorks Time Square og på steder rundt om i verden som er vert for "landingsfest".
Men episentret av handlingen var på JPL, der hundrevis av ingeniører, forskere og NASA-tjenestemenn samlet seg på JPLs Space Flight Operations Facility. EDL-teamet - alle iført matchende lyseblå polo skjorter - overvåket datakonsoller ved oppdragskontroll.
To medlemmer av teamet skilte seg ut: EDL-teamet leder Adam Steltzner - som bærer håret i en Elvis-lignende pompadour - tempoet frem og tilbake mellom radene på konsoller. Flydirektør Bobak Ferdowski sportslig og en forseggjort stjerner og striper Mohawk. Det er klart, i det tjueførste århundre har eksotiske frisyrer erstattet 1960-tallets sorte briller og lommevern for NASA-ingeniører.

På tidspunktet for landing var Ashwin Vasavada en av de lengst betjente forskerne på misjonsteamet, etter å ha sluttet seg til MSL som viseprosjektforsker i 2004 da roveren var under bygging. På den tiden jobbet en stor del av Vasavadas jobb med instrumentteamene for å ferdigstille målene for instrumentene deres, og føre tilsyn med tekniske team for å hjelpe til med å utvikle instrumentene og integrere dem med roveren.
Hvert av de ti utvalgte instrumentene brakte et team av forskere, så med ingeniører, ekstra ansatte og studenter var det hundrevis av mennesker som gjorde roveren klar for lansering. Vasavada hjalp til med å koordinere enhver beslutning og modifisering som kan påvirke den eventuelle vitenskapen som ble gjort på Mars. Under landingen var det eneste han kunne gjøre var å se på.
"Jeg var i rommet ved siden av kontrollrommet som ble vist på TV," sa Vasavada. "For landingen var det ingenting jeg kunne gjøre bortsett fra å realisere de siste åtte årene av livet mitt, og hele min fremtid ri på de syv minuttene med EDL."
Pluss at det faktum at ingen ville vite den reelle skjebnen til rover før 13 minutter etter faktum på grunn av radioforsinkelsestid førte til en følelse av hjelpeløshet for alle på JPL.
"Selv om jeg satt i en stol," la Vasavada til, "jeg tror jeg var mentalt krøllet opp i fosterets stilling."
Da Curiosity sank nærmere Mars, flyttet tre andre veteran-romfartøyer som allerede gikk i bane rundt planeten, i posisjon for å kunne følge med på nykommeren MSL når det sendte informasjon om statusen. Først kommuniserte MSL direkte til Deep Space Network (DSN) antenner på jorden.
For å gjøre telemetri fra romskipet så strømlinjeformet som mulig under EDL, sendte Curiosity ut 128 enkle, men tydelige toner som indikerte når trinn i landingsprosessen ble aktivert. Allen Chen, en ingeniør i kontrollrommet, kunngjorde hver gang de kom: en lyd indikerte at romskipet gikk inn i Mars 'atmosfære; en annen signaliserte at skyverne skyte, og ledet romfartøyet mot Gale Crater. Tentativ klapping og smil kom fra teamet på Mission Control i de tidlige tonene, med følelser som økte etter hvert som romskipet beveget seg nærmere og nærmere overflaten.
Delvis gjennom nedstigningen gikk MSL under Mars-horisonten og la den ut av kommunikasjon med Jorden. Men de tre omløperne - Mars Odyssey, Mars Reconnaissance Orbiter og Mars Express - var klare til å fange, registrere og videresende data til DSN.

Sømløst fortsatte tonene å komme til jorden mens hvert trinn i landingen fortsatte feilfritt. Fallskjermen utplassert. Varmeskjoldet falt bort. En tone signaliserte nedstigningstrinnet som bar roveren og slapp fallskjermen, en annen indikerte drevet flukt og nedstigning mot overflaten. En annen tone betydde at Sky Crane begynte å senke roveren til overflaten.
Det kom en tone som indikerte at Curiosity hjul rørte overflaten, men selv det betydde ikke suksess. Teamet måtte sørge for at flyveveggen til Sky Crane fungerte.
Deretter kom tonen de ventet på: "Touchdown bekreftet," jublet Chen. "Vi er trygge på Mars!"
Pandemonium og glede brøt ut i JPLs misjonskontroll, på landingsfeststedene og på sosiale medier. Det virket som om verden feiret sammen i det øyeblikket. Kostnadsoverskridelser, forsinkelser, alle de negative tingene som noen gang er sagt om MSL-oppdraget så ut til å forsvinne med triumfen av landing.
"Velkommen til Mars!" direktør for Jet Propulsion Laboratory, Charles Elachi, sa på en pressekonferanse etter den dramatiske nedturen, “I kveld landet vi, i morgen begynner vi å utforske Mars. Nysgjerrigheten vår har ingen grenser. ”

"De syv minuttene gikk faktisk veldig fort," sa Vasavada. ”Det var over før vi visste ordet av det. Så hoppet alle opp og ned, selv om de fleste av oss fremdeles behandlet at det gikk så vellykket. ”
At landingen gikk så bra - faktisk perfekt - kan ha sjokkert noe av teamet på JPL. Mens de hadde øvd inn Curiosity sin landing flere ganger, bemerkelsesverdig, var de aldri i stand til å lande kjøretøyet i simuleringene sine.
"Vi prøvde å øve det veldig nøyaktig," sa Vasavada, "slik at alt var i synk - både telemetrien som vi hadde simulert som skulle komme fra romfartøyet, sammen med sanntidsanimasjoner som var blitt opprettet. Det var en ganske sammensatt ting, men det fungerte faktisk aldri. Så den virkelige, faktiske landingen var første gang alt fungerte riktig. ”
Nysgjerrigheten ble programmert til å ta bilder av omgivelsene umiddelbart. I løpet av to minutter etter landingen ble de første bildene strålt til Jorden og dukket opp på visningsskjermene på JPL.
"Vi hadde tidsbestemt banerne til å fly over under landingen, men visste ikke med sikkerhet om stafettkoblingen deres ville vare lenge nok til å få de første bildene ned," sa Vasavada. “De første bildene var ganske rattete fordi beskyttelsesdekslene fremdeles var på kameraene, og skyverne hadde sparket opp mye støv på dekslene. Vi kunne egentlig ikke se det veldig bra, men vi hoppet likevel opp og ned likevel fordi dette var bilder fra Mars. ”
Utrolig nok viste et av de første bildene nøyaktig hva roveren hadde blitt sendt for å studere.
“Vi hadde landet med kameraene i utgangspunktet vendt direkte mot Mt. Skarp, ”sa Vasavada og ristet på hodet. “I HazCam-bildet (fare kamera), rett mellom hjulene, hadde vi dette nydelige skuddet. Der var fjellet. Det var som en forhåndsvisning av hele oppdraget, rett foran oss. ”

I morgen: Del 2 av “Roving Mars With Curiosity,” med ‘Living on Mars Time’ og ‘Discoveries’
“Utrolige historier fra verdensrommet: et bak-scenen-blikk på oppdragene som endrer vårt syn på kosmos” er utgitt av Page Street Publishing, et datterselskap av Macmillan.