Følgende er det siste utdraget fra min nye bok, "Utrolige historier fra verdensrommet: et bak kulissene Se på oppdragene som endrer vårt syn på kosmos." Boken er en innvendig titt på flere aktuelle NASA-robotoppdrag, og dette utdraget er del 3 av 3 som er lagt ut her på Space Magazine, i kapittel 2, “Roving Mars with Curiosity.” Du kan lese del 1 her, og del 2 her. Boken er tilgjengelig på trykk eller e-bok (Kindle or Nook) Amazon og Barnes & Noble.
Slik kjører du en Mars Rover
Hvordan vet Curiosity hvor og hvordan du kan kjøre over Mars 'overflate? Du kan se for deg ingeniører på JPL ved å bruke styrespaker, likt de som brukes til fjernkontrollleker eller videospill. Men i motsetning til RC-kjøring eller spill, har ikke Mars-rover-sjåførene øyeblikkelig visuelle innganger eller en videoskjerm for å se hvor roveren går. Og akkurat som ved landing, er det alltid en tidsforsinkelse av når en kommando sendes til rover og når den blir mottatt på Mars.
"Det kjører ikke i sanntid interaktiv forstand på grunn av tidsforsinkelsen," forklarte John Michael Morookian, som leder teamet av rover-sjåfører.
Den faktiske stillingstittelen til Morookian og teamet hans er ‘Rover Planners’, som nøyaktig beskriver hva de gjør. I stedet for å ‘drive’ roverne i seg selv; de planlegger ruten på forhånd, programmerer spesialisert programvare og laster opp instruksjonene til Curiosity.
"Vi bruker bilder tatt av rover i omgivelsene," sa Morookian. "Vi har et sett stereobilder fra fire svart-hvite navigasjonskameraer, sammen med bilder fra Hazcams (fare unngåelse-kameraer), støttet av høyoppløselige fargebilder fra MastCam som gir oss detaljer om terrengets natur foran og ledetråder om typer bergarter og mineraler på stedet. Dette hjelper til med å identifisere strukturer som ser interessante ut for forskerne. ”
Ved å bruke alle tilgjengelige data kan de lage en tredimensjonal visualisering av terrenget med spesialisert programvare kalt Rover Sequencing and Visualization Program (RSVP).
"Dette er i utgangspunktet en Mars-simulator, og vi plasserte en simulert nysgjerrighet i et panorama av scenen for å visualisere hvordan roveren kan krysse på sin vei," forklarte Morookian. ”Vi kan også ta på oss stereobriller, som lar øynene våre se scenen i tre dimensjoner som om vi var der med roveren.
I virtual reality kan rover-sjåførene manipulere scenen og roveren for å teste alle muligheter for hvilke ruter som er best og hvilke områder du skal unngå. Der kan de gjøre alle feilene (bli sittende fast i en klit, vippe roveren, krasje i en stor stein, kjøre av et stup) og perfeksjonere kjøresekvensen mens den virkelige roveren forblir trygg på Mars.
"Forskerne vurderer også bildene for funksjoner som er interessante og rådfører seg med Rover Planners for å definere en bane. Så komponerer vi de detaljerte kommandoene som er nødvendige for å få nysgjerrighet fra punkt A til punkt B langs den banen, ”sa Morookian. "" Vi kan også innlemme kommandoene som trengs for å gi rover retning for å komme i kontakt med nettstedet ved hjelp av robotarmen. "

Så rover blir pålagt hver natt å slå av i åtte timer for å lade batteriene sine med atomgeneratoren. Men først sender Curiosity data til Jorden, inkludert bilder av terrenget og all vitenskapelig informasjon. På jorden tar Rover Planners disse dataene, gjør planleggingsarbeidet sitt, fullfører programvareprogrammeringen og stråler informasjonen tilbake til Mars. Deretter våkner Curiosity, laster ned instruksjonene og setter til å fungere. Og syklusen gjentar seg.
Nysgjerrighet har også en AutoNav-funksjon som lar roverne krysse områder teamet ikke har sett ennå på bilder. Så det kan gå over bakken og ned på den andre siden til ukjent territorium, med AutoNav som oppdager potensielle farer.
"Vi bruker ikke det for ofte fordi det er beregningsdyktig, noe som betyr at det tar mye lenger tid for roveren å operere i den modusen," sa Morookian. "Vi synes ofte det er en bedre handel å bare komme neste dag, se på bildene og kjøre så langt vi kan se."

Da Morookian viste meg de forskjellige rommene som ble brukt av roverplanleggingsgrupper på JPL, forklarte han hvordan de trenger å operere over en rekke forskjellige tidsplaner.
"Vi har ikke bare den daglige ruteplanleggingen," sa han, "men gjør også langstrakt strategisk planlegging ved hjelp av banebilder fra HiRISE-kameraet på Mars Reconnaissance Orbiter og velger stier basert på funksjoner sett fra bane. Teamet vårt jobber strategisk og leter etter mange måneder for å definere de beste veiene. ”
En annen prosess kalt Supra-Tactical ser ut til bare neste uke. Dette innebærer vitenskapsplanleggere som forvalter og foredler hvilke typer aktiviteter rover vil gjøre på kort sikt. Siden ingen i teamet bor på Mars Time lenger, utarbeider Rover Planners på fredager planene i flere dager.
"Siden vi ikke jobber i helgene, inneholder fredagsplanene flere sols aktiviteter," sa Morookian. "To parallelle team bestemmer hvilke dager roveren skal kjøre og hvilke dager den skal utføre andre aktiviteter, for eksempel arbeid med robotarmen eller andre instrumenter."
Dataene som kommer ned fra rover over helgen blir imidlertid overvåket, og hvis det er et problem, blir et team kalt inn for å gjøre en mer detaljert vurdering. Morookian antydet at de måtte engasjere nødhelgsteamet flere ganger, men så langt har det ikke vært noen alvorlige problemer. “Det holder oss imidlertid på tå,” sa han.
Roveren har en rekke reaktive sikkerhetskontroller av mengden total vipping av roverdekket og artikulasjonen av hjulopphengssystemet, så hvis roveren går over en gjenstand som er for stor, vil den automatisk stoppe.
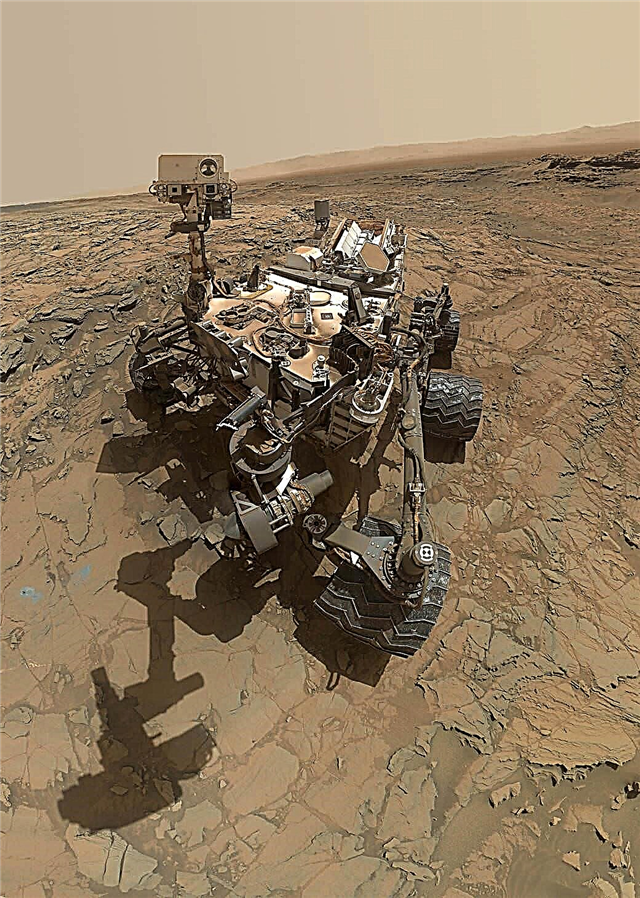
Nysgjerrigheten ble ikke bygget for hastighet. Den var designet for å reise opp til 200 meter på en dag, men den reiser sjelden så langt i en Sol. I begynnelsen av 2016 hadde roveren kjørt totalt 12 km over Mars 'overflate.

Det er flere måter å bestemme hvor langt nysgjerrigheten har reist, men den mest nøyaktige målingen kalles 'Visual Odometry.' Curiosity har spesialiserte hull i hjulene i form av morsekodebokstaver, stavende ut 'JPL' - et nikk til hjemmet av roverens vitenskaps- og ingeniørteam - over den Martiske jorda.
"Visuell odometri fungerer ved å sammenligne det nyeste stereobildet som er samlet omtrent hver meter over stasjonen," sa Morookian. “Individuelle funksjoner i scenen blir matchet og sporet for å gi et mål på hvordan kameraet (og dermed roveren) har oversatt og rotert i tredimensjonalt rom mellom de to bildene, og det forteller oss i en veldig ekte forstand hvor langt nysgjerrigheten har gått .”
Omhyggelig kontroll av rover-sporene kan avdekke hvilken type trekk hjulene har, og om de har sklidd, for eksempel på grunn av høye bakker eller sandmark.
Dessverre har Curiosity nå nye hull i hjulene som ikke er ment å være der.
Rover-problemer
Morookian og prosjektforsker Ashwin Vasavada uttrykte begge lettelse og tilfredshet over at totalt sett - så langt inn i oppdraget - nysgjerrighet er en ganske sunn rover. Hele vitenskapens nyttelast opererer for tiden med nesten full kapasitet. Men ingeniørteamet holder øye med noen få problemer.
"Rundt sol 400, innså vi at hjulene hadde på seg raskere enn vi forventet," sa Vasavada.

Og slitasjen besto ikke bare av små hull; teamet begynte å se punkteringer og ekle tårer. Ingeniører skjønte at hullene ble skapt av de harde, taggete steinene som roveren kjørte over i løpet av den tiden.
"Vi forventet ikke helt den type" spisse "bergarter som gjorde skade," sa Vasavada. ”Vi gjorde også noen tester og så hvordan det ene hjulet kunne skyve et annet hjul inn i en stein, noe som gjorde skadene verre. Vi kjører nå mer forsiktig og kjører ikke så lenge vi har gjort tidligere. Vi har kunnet utjevne skadene til en mer akseptabel rate. "
Tidlig i oppdraget gikk datamaskinen til Curiosity over i 'sikker modus' flere ganger, da programvaren til Curiosity gjenkjente et problem, og svaret var å ikke tillate videre aktivitet og ringe hjem.
Spesialisert programvare for feilbeskyttelse kjører gjennom modulene og instrumentene, og når et problem oppstår, stopper roveren og sender data kalt ‘hendelsesregistreringer’ til jorden. Registreringene inkluderer ulike kategorier av presserende karakter, og tidlig i 2015 sendte rover en melding som i det vesentlige sa: "Dette er veldig, veldig ille." Boret på roverens arm hadde opplevd en svingning i en elektrisk strøm - som en kortslutning.
"Programvaren til Curiosity har muligheten til å oppdage shorts, som jordfeilbryteren du har på badet ditt," forklarte Morookian, "bortsett fra at denne forteller deg" dette er veldig, veldig ille "i stedet for bare å gi deg gult lys."
Siden teamet ikke kan dra til Mars og reparere et problem, løses alt enten ved å sende programvareoppdateringer til roveren eller ved å endre driftsprosedyrer.

"Vi er bare mer forsiktige med hvordan vi bruker boret," sa Vasavada, "og bor ikke med full styrke i begynnelsen, men sakte oppover. Det er liksom hvordan vi kjører nå, mer forsiktig, men det får jobben gjort. Det har ikke hatt stor innvirkning på nå. "
En lettere berøring på boret var også nødvendig for de mykere gjørmsteiner og sandsteiner roveren møtte. Morookian sa at det var bekymring for at de lagdelte bergartene kanskje ikke holder opp under angrepet av standard boreprotokoll, og at de justerte teknikken for å bruke de laveste ‘innstillingene’ som fremdeles gjør det mulig for boret å gjøre tilstrekkelig fremgang i berget.
Men mulighetene for å bruke boret øker når nysgjerrigheten begynner å krysse oppover fjellet. Roveren reiser gjennom det Vasavada kaller et "målrikt, veldig interessant område", da vitenskapsteamet jobber for å binde sammen den geologiske konteksten til alt de ser på bildene.
Finne balanse på Mars
Mens avledningen ved Yellowknife Bay tillot teamet å gjøre noen store funn, følte de press for å komme til Mt. Skarp, så "kjørte som et helvete i et år," sa Vasavada.
Nå på fjellet er det fremdeles presset for å få mest mulig ut av oppdraget, med målet å gjøre det gjennom minst fire forskjellige bergsenheter - eller lag - på Mt. Skarp. Hvert lag kan være som et kapittel i Mars 'historie.

“Utforske Mt. Sharp er fascinerende, "sa Vasavada," og vi prøver å opprettholde en blanding mellom virkelig flotte funn, som - du hater å si - bremser oss og kommer høyere opp på fjellet. Å se nøye på en stein foran deg betyr at du aldri vil kunne gå bort og se på den andre interessante rocken der borte. "
Vasavada og Morookian sa begge at det er en utfordring å bevare den balansen hver dag - å finne det som kalles ‘kneet i kurven’ eller ‘sweet spot’ av den perfekte optimaliseringen mellom å kjøre og stoppe for vitenskapen.
Så er det balansen mellom å stoppe for å gjøre en full observasjon med alle instrumentene og å gjøre "flyby science" der det blir gjort mindre intense observasjoner.
"Vi tar observasjonene vi kan, og genererer alle hypoteser vi kan i sanntid," sa Vasavada. "Selv om vi sitter igjen med 100 åpne spørsmål, vet vi at vi kan svare på spørsmålene senere, så lenge vi vet at vi har tatt nok data."
Curiositys primære mål er ikke toppen, men i stedet en region rundt 400 meter oppover der geologer forventer å finne grensen mellom bergarter som så mye vann i historien, og de som ikke gjorde det. Denne grensen vil gi innsikt i Mars 'overgang fra en våt planet til tørr, og fylle ut et sentralt gap i forståelsen av planetens historie.

Ingen vet egentlig hvor lenge nysgjerrigheten vil vare, eller om den vil overraske alle som forgjengerne Spirit and Opportunity. Etter å ha kommet den forbi det "primære oppdraget" på ett år på Mars (to jordar år), og nå i det utvidede oppdraget, er den ene store variabelen RTG kraftkilde. Selv om den tilgjengelige kraften vil begynne å reduseres jevnt, forventer ikke både Vasavada og Morookian at det skal være et spørsmål i minst fire år til på Jorden, og med riktig "næring", kan kraften vare i et dusin år eller mer.
Men de vet også at det ikke er noen måte å forutsi hvor lang tid nysgjerrigheten vil gå, eller hvilken uventet hendelse som kan avslutte oppdraget.
Beistet
Har nysgjerrighet en personlighet som de tidligere Mars-rovers?
"Egentlig nei, vi ser ikke ut til å antropomorfisere denne roveren slik folk gjorde med Spirit og Opportunity," sa Vasavada. "Vi har ikke knyttet følelsesmessig til det. Sosiologer har faktisk studert dette. ” Han ristet på hodet med et underholdt smil.
Vasavada antydet at det kan ha noe med Curiositys størrelse å gjøre.
"Jeg tenker på det som et kjempedyr," sa han ansiktet. "Men ikke på en måtelig måte."

Det som har kommet for å karakterisere dette oppdraget, sa Vasavada, er kompleksiteten i det, i alle dimensjoner: den menneskelige komponenten i å få 500 mennesker til å jobbe og samarbeide mens vi optimaliserer alles talenter; holde rover trygg og sunn; og holde ti instrumenter i gang hver dag, som noen ganger gjør helt ubeslektede vitenskapsoppgaver.
"Hver dag er vår egen lille 'syv minutter med terror', der så mange ting må til for hver eneste dag," sa Vasavada. "Det er en million potensielle problemer og interaksjoner, og du må hele tiden tenke på alle måtene ting kan gå galt, fordi det er en million måter du kan rote deg på. Det er en intrikat dans, men heldigvis har vi et flott team. ”
Så la han til med et smil, "Dette oppdraget er imidlertid spennende, selv om det er et dyr."
“Utrolige historier fra verdensrommet: Et bak-skjerm-blikk på oppdragene som endrer vårt syn på kosmos” er utgitt av Page Street Publishing, et datterselskap av Macmillan.