NASAs Jet Propulsion Laboratory kunngjorde nylig at det utvikler et lite dronehelikopter for å speide veien for fremtidige Mars-rovere. Hvorfor ville Mars-rovere trenge en slik robotguide? Svaret er at det er veldig vanskelig å kjøre på Mars.
Her på jorden kan roboter som utforsker vulkanske felger, eller hjelpe redningsmenn, drives med fjernkontroll, med en joystick. Dette er fordi radiosignaler når roboten nærmest øyeblikkelig fra sitt senter. Å kjøre på månen er ikke mye vanskeligere. Radiosignaler som kjører med lysets hastighet tar omtrent to og et halvt sekund for å ta turen tilbake til månen og tilbake. Denne forsinkelsen er ikke lang nok til å alvorlig forstyrre fjernkontrollkjøring. På 1970-tallet kjørte sovjetiske kontrollører Lunokhod-månen rover på denne måten, og lyktes med å utforske mer enn 40 km med månens terreng.
Å kjøre på Mars er mye vanskeligere, fordi det er så mye lenger unna. Avhengig av sin posisjon med hensyn til Jorden, kan signalene ta mellom 8 og 42 minutter for tur / retur. Forprogrammerte instruksjoner må sendes til rover, som den deretter utfører på egen hånd. Hver Mars-kjøretur tar timer med nøye planlegging. Stereobilder tatt av roverens navigasjonskameraer blir nøye undersøkt av ingeniører. Bilder fra romfartøy som kretser rundt Mars gir noen ganger tilleggsinformasjon.
En rover kan programmeres enten for å bare utføre en liste over kjørekommandoer sendt fra Jorden, eller den kan bruke bilder tatt av navigasjonskameraene og behandlet av datamaskinene ombord for å måle hastighet og oppdage hindringer eller farer av seg selv. Det kan til og med plotte sin egen trygge vei til et spesifisert mål. Stasjoner basert på instruksjoner fra bakken er de raskeste.
Mars Exploration Rovers Spirit and Opportunity kunne kjøre opp til 124 meter på en time på denne måten. Dette tilsvarer omtrent lengden på en amerikansk fotballbane. Men denne modusen var også den minst trygge.
Når roveren aktivt guider seg med kameraene sine, er fremgangen sikrere, men mye tregere på grunn av all bildebehandlingen som trengs. Det kan gå videre med så lite som 10 meter i timen, som er omtrent avstanden fra målstreken til 10 yardlinjen på en amerikansk fotballbane. Denne metoden må brukes når roveren ikke har et klart syn på ruten fremover, noe som ofte er tilfelle på grunn av ulendt og kupert terreng.
Fra begynnelsen av 2015 er den fjerneste nysgjerrigheten som har kjørt på en dag, 144 meter. Mulighetens lengste daglige kjøretur var 224 meter, en avstand fra lengden på to amerikanske fotballbaner.
Hvis bakkekontrollere kunne få en bedre oversikt over banen fremover, kan de tenke ut instruksjoner som lar en fremtidig rover trygt kjøre mye lenger på en dag.
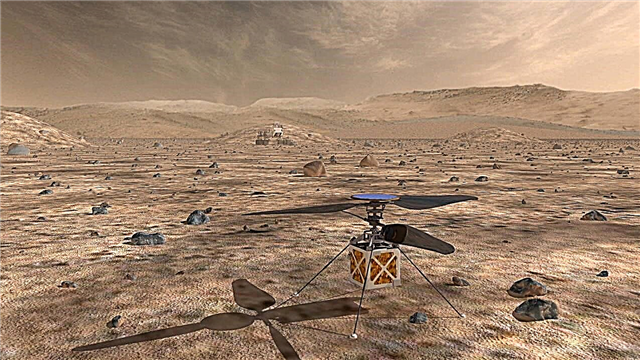
Det er her ideen om et dronehelikopter kommer inn. Helikopteret kan fly ut foran roveren hver dag. Bilder laget fra dets luftfartspunkt vil være uvurderlige for bakkekontrollere for å identifisere vitenskapelige interessepunkter og planlegge kjøreruter for å komme dit.
Å fly et helikopter på Mars gir spesielle utfordringer. En fordel er at Mars-tyngdekraften bare er 38% så sterk som den fra Jorden, slik at helikopteret ikke trenger å generere så mye løft som en av den samme massen på Jorden. Propellbladene til et helikopter genererer løft ved å skyve luft nedover. Dette er vanskeligere å gjøre på Mars enn på jorden, fordi den Martiske atmosfæren er hundre ganger tynnere. For å fortrenge nok luft, må propellbladene spinne veldig raskt, eller være veldig store.
Kopteren må være i stand til å fly alene, ved å bruke forhåndsinstruksjoner, opprettholde stabil flyging langs en forhåndsdefinert rute. Den må lande og ta av gjentatte ganger i steinete Martian-terreng. Endelig må den være i stand til å overleve de tøffe forholdene på Mars, der temperaturen stuper til 100 grader Fahrenheit eller lavere hver natt.
JPL-ingeniørene tegnet en copter med en masse på 1 kilo; en liten brøkdel av 900 kg massen av Curiosity rover. Propellbladene spenner seg 1,1 meter fra knivspissen til knivspissen, og er i stand til å snurre med 3400 rotasjoner per minutt. Kroppen er omtrent på størrelse med en vevskasse.
Kopimaskinen er solcelledrevet, med en disk med solceller som samler nok strøm hver dag til å drive en flytur på to til tre minutter og for å varme kjøretøyet om natten. Den kan fly omtrent en halv kilometer på den tiden og samle bilder for overføring til bakkekontroll når det går. Ingeniører forventer at rekognosering som dronekopteren samler inn vil være uvurderlig når du planlegger en rover-stasjoner, og tredobler avstanden som kan kjøres på en dag.
Referanser og videre lesning:
Takk til Mark Maimone fra NASA Jet Propulsion Laboratory for informasjon om de daglige kjøreavstandene til nysgjerrighet og mulighet.
J.J. Biesiadecki, P. C. Leger, og M. W. Maimone (2007), ‘avveininger mellom rettet og autonom kjøring på Mars-utforskningsroverne’, The International Journal of Robotics Research, 26 (1), 91-104
E. Howell, Opportunity Mars rover trekker forbi 41 kilometer mot ‘Marathon Valley’, Space Magazine, desember 2014.
T. Reyes, en utrolig reise, Mars Curiosity rover når basen av Mount Sharp. Space Magazine, september 2014.
Helikopter kan være "speider" for Mars-rovere. NASA Jet Propulsion Laboratory Pressemelding. 22. januar 2015.
Crazy Engineering: Mars-helikopteret. NASA Jet Propulsion Laboratory-video.
Curiosity- Mars Science Laboratory, NASA.
Mars- Future Rover-planer. NASA