ESA har brukt de siste årene på å jobbe for å opprette en internasjonal månebase, noe som vil tjene som en åndelig etterfølger av den internasjonale romstasjonen (ISS). For å oppnå dette har de vervet hjelp fra andre romfartsorganer og entreprenører for å utvikle konsepter for romhabitater og byggemetoder, samt måter å gi robotisk og logistisk støtte.
Nylig signerte ESAs Technology Development Element (TDE) med den franske teknologiutvikleren COMEX for å lage TRAILER-robot-systemet. Dette toårige prosjektet skal teste en ny misjonsarkitektur der to rovere jobber i tandem (og med hjelp av astronauter) for å utforske månens overflate og bygge en permanent utpost på Månen.
TRAILER-systemet vil utnytte en rekke nylige fremskritt innen robotikk, fjernstyring og autonomiprogramvare. Tandemrobotene er designet for å betjenes fra Jorden eller fra en base i månebanen - dvs. Lunar Gateway. Imidlertid vil de også bli pålagt å operere autonomt i strekk av tid og utføre oppgaver uten at astronauter har tilsyn med dem.

Til syvende og sist er TRAILER designet for å teste robot explorer systemer som består av to elementer, kjent som TRACTOR og WAIN. Den første krever et smidig roverelement som vil være i stand til å lufte seg ut på overflaten i korte perioder, få prøver for analyse og kommunisere via en lokal trådløs sender / mottaker.
I mellomtiden vil WAIN-elementet bestå av en aktiv trailer som vil gi et driftsunderlag for roveren og være begrenset med tanke på mobilitet og navigasjon. Dette vil omfatte et lokalt trådløst nettverk for å lette kommunikasjonen fra månens overflate til Jorden (eller bane) for å gi strøm til roveren og seg selv, og hjelpe til vitenskapelige operasjoner med et laboratorium ombord.
Mens disse robotene kunne kontrolleres helt fra Jorden, ble oppdragsarkitekturen designet med Lunar Gateway i tankene. Dette habitatet - som utvikles av NASA, ESA og et konsortium av internasjonale partnere - vil være den første menneskelige utposten utenfor Jordens bane og tjene som en basecamp for operasjoner på månens overflate.
Disse inkluderer NASAs retur til månen (Project Artemis) og ESAs foreslåtte Human-Enhanced Robotic Architecture and Capability for Lunar Exploration and Science (HERACLES) lander og rover. Og selvfølgelig er det ESAs langsiktige planer, sammen med andre romfartsbyråer og internasjonale partnere, for å skape den etterlengtede International Moon Village.
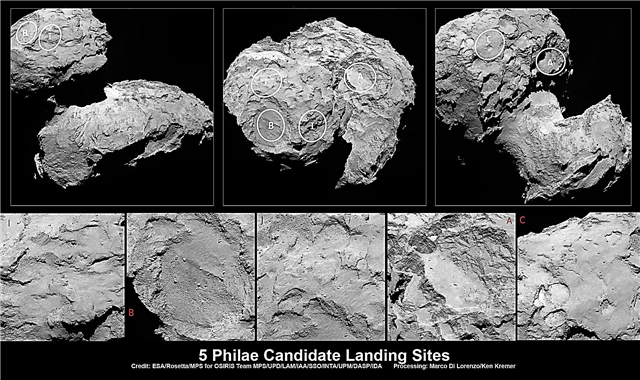
I alle tilfeller vil suksess komme ned på samarbeid; ikke bare mellom byråer og mellom offentlige og private enheter, men også mellom astronauter og robotutforskere. Når TRAINER er fullført, vil den bli med i en rekke robotoppdrag i South Pole-Aitken Basin som vil undersøke etter ressurser som kan brukes til å støtte menneskelige operasjoner - også. Ressursutnyttelse i situasjonen (ISRU).
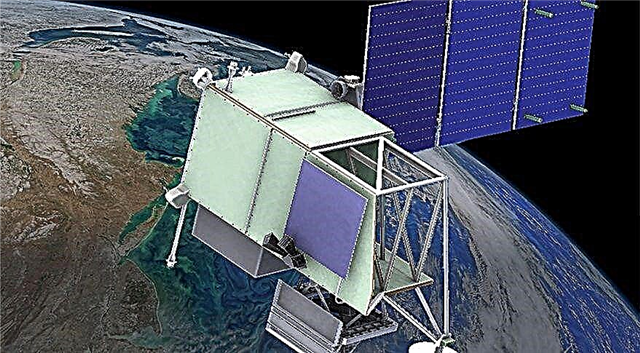
ESA er også for tiden engasjert i utviklingen av en ny type kommandoinfrastruktur og et styringssystem for kraft-tilbakemelding som lar astronauter "føle" hva en rover føler. Som en del av Analog-1-eksperimentene demonstrerte ESA-astronauten Luca Parmitano vellykket systemets evne til å kontrollere en rover på jorden fra ISS.
Utviklingen av TRAILER vil bli ledet av COMEX med støtte gitt av det tyske forskningssenteret for kunstig intelligens Robotics Innovation Center (DFKI RIC) og det Wien-baserte robotfirmaet LIQUIFER Systems Group.